
Mécanique pour l'enseignement technique industriel/Modélisation - Les actions mécaniques

Présentation
[modifier | modifier le wikicode]Le but de ce chapitre est d'expliquer comment on modélise les actions mécaniques. Cela permet de déterminer les efforts que doivent supporter les structures, et que doivent développer les actionneurs (vérins, moteurs), et donc de vérifier des systèmes existants ou de dimensionner des projets.
Pour pouvoir effectuer des calculs, il faut quantifier ces actions, c'est-à-dire les exprimer sous forme de nombres.
Objectif
[modifier | modifier le wikicode]Le but de ce chapitre est de savoir donner les caractéristiques une action mécanique : point d'application, direction, sens, intensité.
| Connaissances (notions, concepts) | Niveau | |||
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |
Actions mécaniques sur un solide :
|
× | |||
| Actions mécaniques dans les liaisons : actions associées aux liaisons mécaniques élémentaires |
× | |||
Actions mécaniques
[modifier | modifier le wikicode]Phénomène pouvant modifier le mouvement d'un objet ou pouvant le déformer.
- Activité 1
Donnez des exemples d'actions mécaniques.
Voici quelques exemples d'actions mécaniques :
- le poids provoque la chute d'un objet ; il fait fléchir une tige ou lame fine et longue, étire un ressort ;
- le vent et le courant de l'eau font avancer un navire, tourner un moulin, une turbine ; ils font se courber un roseau ;
- une pièce peut pousser ou tirer une autre pour la mettre en mouvement : vérin, câble, chaîne, barre de traction, …
- un aimant attire une pièce d'acier ;
- une manivelle, un volant mettent un système en rotation ;
- un tournevis fait tourner une vis ;
- …
- Activité 2
Classer les actions mécaniques en familles.
On peut distinguer les actions selon la distance entre la source d'effort et l'effet :
- actions de contact : poussée ou traction directes, d'un solide ou d'un fluide ;
- actions à distance : poids, magnétisme.
On peut aussi les distinguer selon la nature du mouvement ou de la déformation créées :
- mouvement ou déformation linéaire (en ligne droite) ;
- mouvement ou déformation en tournant.

On distingue principalement deux types d'actions mécaniques :
- les forces, qui peuvent créer un mouvement ou une déformation linéaires ;
- les moments ou couples, qui peuvent créer un mouvement ou une déformation en tournant.
| Force | Moment, couple | |
|---|---|---|
| Mouvement | Translation rectiligne |
Rotation |
| Déformation | Élongation, compression, cisaillement |
Torsion, flexion |
Forces
[modifier | modifier le wikicode]Une force est donc un phénomène pouvant créer un mouvement de translation, étirer une pièce, l'écraser ou la cisailler. Alors que certaines grandeurs peuvent se représenter par un simple nombre — température, pression, masse —, ce n’est pas le cas d'une force : si l’on pousse une table « comme ci » ou « comme ça »[1], on n'obtient pas le même effet (le même déplacement). Pour la représenter, il faut donc utiliser un objet mathématique qui décrive la direction et le sens : un vecteur.

Un vecteur force est donc caractérisé par :

- son point d'application : là où le phénomène agit ;
- la direction : direction de la translation, de la déformation ;
- le sens : sens de la translation, de la déformation ;
- l'intensité, exprimée en newtons (abréviation N) ; on parle aussi de « norme du vecteur », notée .

L'intensité d'une force se mesure par la déformation d'un ressort ; l'appareil s’appelle un dynamomètre.
Pour l'intensité, on utilise aussi le décanewton (daN) :
- 1 daN = 10 N
- 1 N = 0,1 daN
ce qui correspond grosso modo à une ancienne unité, le kilogramme-force (kgf).
On synthétise ces caractéristiques dans un tableau.
| Action | Point d'application |
Direction | Sens | Intensité |
|---|---|---|---|---|
| … | … | … | … | … (N) |
Il peut y avoir une ambiguïté entre direction et sens :
- direction : c’est une droite géométrique, soit désignée par deux point, par exemple « (AB) », soit par l'angle avec l'horizontale ou la verticale, par exemple « ∠ 45° », soit un trait horizontal « — » ou vertical « | » ;
- sens : c’est une flèche ayant la même orientation que la direction, du type « → », « ↗ », « ↑ », …
Par analogie, pour signaler un accident sur une autoroute, il faut indiquer entre autres :
- le nom de l'autoroute (par exemple « A1 ») : c’est la direction ;
- le sens de circulation de la voie (par exemple « dans le sens Paris vers Lille ») : c’est le sens[2].
Sur le dessin, le vecteur est représenté par une flèche ayant la direction et le sens de l'action mécanique. Elle touche le point d'application, par le pied ou par la pointe. La longueur est déterminée par une échelle, par exemple
- « 1 mm représente 1 N » : une force de 25 N est représentée par une flèche de 25 mm (2,5 cm) de long ;
parfois, aucune échelle n'est indiquée, on choisit librement, « arbitrairement », la longueur de la flèche.
Poids
[modifier | modifier le wikicode]Définition et caractéristiques
[modifier | modifier le wikicode]Le poids est une force qui attire les objets vers le bas ; c’est une action qu'exerce la Terre sur les objets. C'est donc une action à distance : elle s'exerce même si l’on est à l'étage d'un bâtiment ou dans un avion, le contact avec le sol n’est pas nécessaire.
Il faut bien distinguer les notions de masse et de poids.
| Masse | Poids |
|---|---|
La masse représente la quantité de matière ; elle est la même partout.
|
Le poids varie selon l'endroit où l’on se trouve.
|
La masse représente l'inertie, c'est-à-dire la difficulté que l’on a à mettre un objet en mouvement.
|
Le poids le phénomène qui tire l’objet vers le bas.
|
| La masse se mesure avec une balance | Le poids se mesure avec un dynamomètre, ou peson |
| La masse se représente par un nombre ; l'unité est le kilogramme (kg | Le poids se représente par un vecteur ; l'unité est le newton (N) |
-
 Balance de Roberval
Balance de Roberval -
 Balance romaine
Balance romaine -
 Balance électronique
Balance électronique -
 Pesons (dynamomètres)
Pesons (dynamomètres) -
 Principe du dynamomètre
Principe du dynamomètre





La confusion vient du fait que le poids est proportionnel à la masse : sur Terre, on a
- P = mg
avec
- P : intensité du poids (N) ; ;
- m : masse (kg ;
- g : gravité (pesanteur), g ≃ 9,81 N/kg ;
on prend souvent pour simplifier g ≃ 10 N/kg.

L'unité de g est également notée m/s2 (mètre par seconde au carré) ; en effet, c’est aussi l'accélération d'un objet tombant en chute libre (en négligeant le frottement de l'air), g est d'ailleurs appelé « accélération de la gravité ».
- g ≃ 9,81 m/s2 ≃ 10 m/s2.
Le poids est une force répartie : chaque élément d'un objet a son propre poids. Par exemple, pour un humain, chaque organe — doigt, oreille, nez, …— a son propre poids. On modélise le poids comme une force s'appliquant en un point appelé « centre de gravité » et noté G.
Point d'application du poids d'un objet
Une chute est un mouvement vertical dirigé vers le bas ; le poids est donc une force verticale dirigée vers le bas.
On a ainsi toutes les caractéristiques du poids ; elles sont résumées dans le tableau ci-dessous.
| Action | Point d'application |
Direction | Sens | Intensité |
|---|---|---|---|---|
| G | | | ↓ | mg |

Calcul du poids d'une pièce
[modifier | modifier le wikicode]Considérons une pièce faite d'un seul matériau. Son poids P dépend de la masse m ; cette masse dépend de la quantité de matière, c'est-à-dire
- du volume de la pièce V, exprimé en m3 ;
- du matériau, et plus précisément de sa masse volumique ρ, exprimée en kg/m3.
Au lieu de la masse volumique, on utilise parfois la densité par rapport à l'eau d, qui est donnée sans unité mais correspond à la masse volumique exprimée en kg/dm3 (ou kg/L) ; dans ce cas-là, on exprime le volume en dm3.
On a ainsi :
- m = ρ × V
- P = m × g.
Il faut donc d’abord calculer le volume de la pièce.
- Exemples
Calculer le poids d'une planche de bois de densité d = 0,5 et de dimensions 2 m × 14 cm ép. 21 mm. On prendra g = 9,81 N/kg.
-
 Planche
Planche -
 Dimensions
Dimensions


Convertissons toutes les longueurs en dm :
| m | dm | cm | mm |
|---|---|---|---|
| 2 | 0 | ||
| 1, | 4 | ||
| 0, | 2 | 1 |
On a donc
- V = L × ℓ × e = 20 × 1,4 × 0,21 = 5,88 dm3
- m = ρV = 0,5 × 5,88 = 2,94 kg
- P = mg = 2,94 × 9,81 = 28,8 N
Calculer le poids d'un barreau cylindrique (rond) de diamètre ∅10 mm et de 200 mm de long, en acier de masse volumique ρ = 7 800 kg/m3. On prendra g = 10 N/kg.
-
 Barres cylindriques (« ronds »)
Barres cylindriques (« ronds ») -
 Dimensions
Dimensions


Convertissons toutes les longueurs en m :
| m | dm | cm | mm |
|---|---|---|---|
| 0, | 0 | 1 | 0 |
| 0, | 2 | 0 | 0 |
On a donc
- V = π × r2 × h = π × 0,0052 × 0,2 = 1,57⋅10−5 m3 = 0,000 015 7 m3
- m = ρV = 7,800 × 1,57⋅10-5 = 0,123 kg
- P = mg = 0,123 × 10 = 1,23 N
Détermination du centre de gravité
[modifier | modifier le wikicode]Le centre de gravité G est le point d'application du poids d'un objet. Il faut donc le connaître pour pouvoir résoudre les problèmes de statique.


Mais la connaissance du centre de gravité est aussi un élément de sécurité important, concernant la stabilité des objets :
- lorsque l’on pose un objet sur des appuis, il faut impérativement que le centre de gravité se trouve entre les appuis, sinon l’objet bascule ; c’est notamment critique dans le cas d'un plan incliné ;
- lorsque l’on lève un objet avec une élingue (câble, sangle), le centre de gravité se met à l'aplomb du point d'accroche de l'élingue ; si les deux ne sont pas alignés au départ, l’objet va basculer.
L'élingage est d'ailleurs une manière de déterminer la position du centre de gravité : on lève l’objet de quelques centimètres, et s'il bascule, on le repose et on décale le point d'accrochage, jusqu'à obtenir l'équilibre.
Pour déterminer la position du centre de gravité, on applique les règles suivantes.
Si l’objet est fait d'un matériau homogène et qu’il présente un plan de symétrie orthogonale (miroir), G est dans ce plan de symétrie.
S'il présente un axe de symétrie orthogonale, G est sur cet axe.
S'il présente un point de symétrie centrale, G est ce point.
Pour les objets de forme simple — cube, parallélépipède rectangle (et notamment tôles rectangulaires, plats — barres de section rectangulaire — et carrés — barres de section carrée), sphères (boules, réservoirs sphériques), cylindres (et notamment disques, ronds — barres de section circulaire —, tubes et viroles) —, le centre de gravité est le centre de l'objet.
-
 Cylindre
Cylindre -
 Parallélépipède rectangle
Parallélépipède rectangle



Dans le cas d'un prisme dont la base est un triangle rectangle, le centre de gravité se situe sur la droite située au tiers des côtés de l'angle droit.

Si le système est composé de deux objets rep. 1 et 2, de masse respective P1 et P2, et de centre de gravités respectifs G1 et G2 situés à l'abscisse x1 et x2, alors le centre de gravité total G est situé à l'abscisse
- .

C'est la moyenne pondérée des abscisses.
Cette méthode peut s'étendre à n pièces de masse P1, P2, …, Pn et dont les abscisses des centres de gravité sont notées x1, x2, …, xn :
- .

On peut présenter le calcul sous la forme d'un tableau.
| Pièce i | Pi | xi | Pixi |
|---|---|---|---|
| 1 | P1 | x1 | P1x1 |
| 2 | P2 | x2 | P2x2 |
| … | |||
| n | Pn | xn | Pnxn |
| Somme | Ptotal | — | A |
et
- .


Exemple.
Nous étudions un cuiseur hydrolyseur (voir figure ci-contre) : c’est un four rep. 1 utilisé pour transformer les carcasses d’animaux en farine. Il est doté d’un moteur rep. 2 permettant de faire circuler les produits, ce qui assure une production en continu. Il est en appuis en A et en D sur des plots antivibrations rep. 0.
Le four 1 a un poids de 780 N et son centre de gravité est G1. Le moteur 2 a un poids de 920 N et son centre de gravité est G2.
Question.
Déterminer la position du centre de gravité G de l'ensemble.
Réponse.
On choisit de placer l'origine du repère en A. La distance horizontale entre A et G2 vaut 1 743 - 150 = 1 593 mm.
On peut utiliser le tableau :
| Pièce i | Pi (N) | xi (mm) | Pixi (Nmm) |
|---|---|---|---|
| 1 | 780 | 325 | 253 500 |
| 2 | 920 | 1 593 | 1 465 560 |
| Somme | 1 700 | — | 1 719 060 |
donc
- .

On peut aussi présenter le calcul sous la forme d'une formule :
- .

Note.
On peut utiliser n’importe quelle unité de longueur tant que l’on utilise toujours la même ; pour les grands systèmes, il est souvent intéressant d’utiliser des mètres afin de manipuler des nombres plus petits. Par ailleurs, la position de l'origine des abscisses O n'a pas d'importance. Il arrive fréquemment que l’on prenne un des centres de gravité comme origine, par exemple O = G1 et donc x1 = 0, ce qui simplifie les calculs.
Dans l'exemple ci-dessus, nous pouvons donc écrire
| Pièce i | Pi (N) | xi (mm) | Pixi (Nm) |
|---|---|---|---|
| 1 | 780 | 0,325 | 253,5 |
| 2 | 920 | 1,593 | 1 465,56 |
| Somme | 1,700 | — | 1 719,06 |
- .

ou bien
- .

Note.
Puisque le poids est proportionnel à la masse, on peut utiliser la masse (en kg) pour pondérer :
- .

Si les pièces sont en tôles qui sont faites du même matériau et qui ont la même épaisseur, on peut utiliser l'aire des pièces (en m2, cm2 ou mm2), puisque la masse est proportionnelle à l'aire :
- .

Forces de pression
[modifier | modifier le wikicode]
Une pression est une force qui se répartit sur une surface :

où
- P est la pression ; l'unité internationale est le pascal (Pa) ;
- F est la force, en newton (N) ;
- S est l'aire de la surface, en mètres carrés (m2) ;
on a donc 1 Pa = 1 N/m2.
La pression peut être l'action d'un fluide — gaz (pression atmosphérique, circuit pneumatique), liquide (pression de l'eau, circuit hydraulique) — ou bien d'un solide (pression de contact).
Une pression de 1 Pa est très faible ; c’est le poids de 100 g réparti sur un carré de 1 m de côté. Dans la pratique, on utilise
- le bar (bar) :
- 1 bar = 100 000 Pa = 105 Pa,
- 1 bar = 1 daN/cm2 ;
- le mégapascal (MPa) :
- 1 MPa = 1 000 000 Pa = 106 Pa,
- 1 MPa = 1 N/mm2,
- 1 MPa = 10 bar.
La pression atmosphérique vaut à peu près 1 bar ; la valeur de référence est 1,013 bar (mais la valeur réelle dépend du lieu et du moment). En météorologie, on l'exprime en milliers d'hectopascals (hPa) :
- 1 hPa = 100 Pa
- 1 000 hPa = 100 000 Pa
Si j'appuie avec mon doigt sur une table, il ne se passe rien de particulier : la force, de l’ordre de 500 N, est répartie sur la surface de contact de mon doigt, de l’ordre de 50 mm2, soit une pression
- P = F/S = 500/50 = 10 MPa.
Si maintenant j'appuie sur une punaise, la force est concentrée sur la pointe don l'aire est environ 0,05 mm2 ; la pression vaut alors
- P = F/S = 500/0,05 = 10 000 MPa ;
la punaise perce le bois de la table.
La force résultant d'une pression P sur une surface d'aire S vaut donc (transformation de formule) :
- F = P × S
La direction est normale (perpendiculaire) à la surface ; le sens est celui de la poussée. Le point d'application, appelé « centre de poussée », est le centre C de la surface.
| Action | Point d'application |
Direction | Sens | Intensité |
|---|---|---|---|---|
| C (centre de la surface) |
⊥ surface | poussée | P × S |

Actions de contact
[modifier | modifier le wikicode]Une action de contact est une force créée par le contact entre deux pièces. On envisage principalement deux cas :
- les pièces sont liées par une liaison sphère-plan ;
- les pièces sont liées par une liaison pivot.
On peut faire l'étude pour chacune des 11 liaisons mécaniques (voir Modélisation - Les liaisons mécaniques), mais ces deux liaisons suffisent à traiter la plupart des problèmes.
On considère des liaisons parfaites, c'est-à-dire sans adhérence ni frottement.
Les liaisons ont un jeu suffisant et sont lubrifiées, elles « n'accrochent » pas, ne grippent pas. On ne peut transmettre d'effort que par obstacle, pas par frottement, on exclue donc de l'étude les transmissions par courroies asynchrones (lisses), par galet, les embrayages et freins.
Soient un solide rep. 1 et un solide rep. 2 en liaison au point A. On note :
- l'action du solide 1 sur le solide 2 ;
- l'action du solide 2 sur le solide 1.



Il s'agit bien de deux actions différentes. C'est une question de point de vue : si une personne 1 pousse sur une personne 2, alors la personne 2 pousse elle aussi sur la personne 1. C'est la notion de réciprocité.
De plus : si la personne 1 pousse sur la personne 2 avec une force de 100 N, alors la personne 2 pousse sur la personne 1 avec une force de également de 100 N. C'est le principe des actions réciproques, qui sera vu plus loin.
Liaison sphère-plan
[modifier | modifier le wikicode]
- Rappel
- La liaison sphère-plan, ou liaison ponctuelle, est la liaison ayant un seul degré de liaison : elle ne bloque qu'un degré de liberté, la translation perpendiculaire au plan de contact. Cela correspond à une butée, à un pied de table, …
La force dans le cas d'une liaison sphère-plan est nécessairement normal (perpendiculaire) au plan d'appui. Le point d'application est le point de contact entre les solides.
On ne connaît que ces deux caractéristiques de la force. Les autres — sens, intensité (norme) — sont inconnus au début ; le but de la statique est précisément de déterminer les caractéristiques inconnues. Comme on ne connaît pas le sens, on représente la force par une double-flèche « ↔ » supportée par un trait d'axe « ⋅ — ⋅ — »[3]
Dans le cas illustré ci-contre (contact en A entre les pièces 1 et 2, normale selon l'axe ), le tableau bilan est :

| Action | Point d'application |
Direction | Sens | Intensité |
|---|---|---|---|---|
| A | ? | ? |

On pourrait penser connaître le sens, puisqu'une pièce en contact ne peut que pousser (sauf collage). Il faut bien comprendre que le symbole indique la nature du contact — un point — et la normale au plan, mais pas comment se contact est fait. On peut par exemple avoir un contact double, « biponctuel » ; en raison du jeu, il n'y a réellement qu'un seul contact à la fois, mais il peut être d'un côté ou de l'autre.
Liaison pivot
[modifier | modifier le wikicode]
- Rappel
- La liaison pivot correspond à une charnière. Elle n'a qu'un degré de liberté et cinq degrés de liaison.
Le fait de savoir que l’on a une liaison pivot ne permet pas de savoir quoi que ce soit sur les caractéristiques de la force, hormis le point d'application qui est le centre de la liaison.
Graphiquement, la force totalement inconnue est représentée par une flèche brisée « ↯ », indiquant par là que l’on ne connaît pas la direction. Le tableau des caractéristiques contient trois points d'interrogation.
| Action | Point d'application |
Direction | Sens | Intensité |
|---|---|---|---|---|
| A | ? | ? | ? |
Tableau des caractéristiques et composantes
[modifier | modifier le wikicode]Comme nous l'avaons vu au chapitre Éléments de géométrie > Vecteurs, un vecteur peut se représenter par deux composantes dans le plan. On peut donc établir une relation entre le tableau de caractéristiques et les composantes. Par contre, au début d'un problème de statique, certaines composantes sont inconnues.
Voici quelques exemples.
| Action | Point d'application |
Direction | Sens | Intensité |
|---|---|---|---|---|
| G | | | ↓ | 28,8 N |

| Action | Point d'application |
Direction | Sens | Intensité |
|---|---|---|---|---|
| A | — | ? | ? |


| Action | Point d'application |
Direction | Sens | Intensité |
|---|---|---|---|---|
| B | ? | ? | ? |


On voit que, si l’on exclue la colonne « Sens », le nombre de composantes inconnues est le nombre de points d'interrogation dans le tableau. La colonne « Sens » détermine au signe des composantes.
Moment
[modifier | modifier le wikicode]Le moment est donc une action mécanique « tournante ».
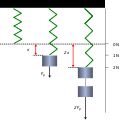
Loi des leviers
[modifier | modifier le wikicode]
Un levier est une machine simple permettant d'amplifier un effort. Pour produire une force F1 à l'extrémité du levier, l'opérateur doit fournir une force F2 vérifiant la loi des leviers :
F1 × d1 = F2 × d2
Les distances d1 et d2 sont les bras de levier : distance du pivot à la ligne d'action de la force, pris perpendiculairement à la ligne d'action.
On a donc

le levier amplifie la force d'un facteur d2/d1.
Moment d'une force
[modifier | modifier le wikicode]Grâce à un levier, une force peut produire un effort en rotation.

Le moment d'une force par rapport à un point de pivot A vaut

où
- F est la norme de , en newtons (N) ;
- d est le bras de levier de par rapport à A, en mètres (m) ;
- le signe dépend du sens de rotation induit par la force : + pour le sens direct (trigonométrique, antihoraire, ↺), - pour le sens indirect (↻).
Le moment s'exprime en newtons-mètres (Nm). On peut prendre le bras de levier en millimètres (mm), le moment est alors en newtons-millimètres (Nmm).
Mnémotechnique : le sens positif va de l'axe x vers l'axe y.
Couple
[modifier | modifier le wikicode]
Un couple est l'action combinée de deux forces et de même direction, même norme, mais de sens opposés :


- .

Un couple a une résultante nulle
- .

Le moment résultant par rapport à n’importe quel point est noté et vaut


où
- A est un point quelconque ;
- d est la distance séparant les droites d'action de et de , pris perpendiculairement aux lignes d'action ;
- .

Le moment du couple est simplement appelé « couple ». On confond souvent les termes « moment » et « couple » : on parle de « couple moteur », de « couple résistant », de « couple de serrage ».
La notice d'utilisation d'une perceuse ou d'une visseuse-dévisseuse indique le couple, en général de l’ordre de 1 à 10 Nm pour une visseuse-dévisseuse sans fil, 100 Nm et plus pour une perceuse ou une boulonneuse à frappe tangentielle.
| Situation | Valeurs |
|---|---|
| perceuse ou visseuse-dévisseuse sans fil | 1 à 10 Nm |
| couple de serrage maximum d'une vis M3 de classe 8.8 | 1,3 Nm |
| couple de serrage maximum d'une vis M10 de classe 8.8 | 48 Nm |
| moto Honda VTR 1 000 | 90 Nm |
| boulonneuse à frappe tangentielle | 100 Nm |
| Renault Clio 2 à 3 750 tr/min | 130 Nm |
| broche d’un centre d’usinage Kia Hyundai VX500 | 365 Nm |
| couple de serrage maximum d'une vis M20 de classe 8.8 | 415 Nm |
| masse de 100 kg au bout d’une potence de 1 m | 1 000 Nm |
| broche d’un tour CNC Haas Automation SL-40L | 1 900 Nm |
| moteur de camion Renault Mack 12L | 2 250 Nm |
| masse de 1 t au bout d’une potence de 10 m | 100 000 Nm |
Moment transmis par contact
[modifier | modifier le wikicode]Une pièce peut transmettre un moment à une autre pièce par contact. C'est le cas par exemple d'un arbre moteur qui transmet un moment du moteur à une roue (roue dentée, poulie). Le moment qu'exerce une pièce 1 sur une pièce 2 est noté .

Dans le cas des problème plans, un moment se représente graphiquement par une flèche tournante, ↺ ou ↻. Analytiquement, il s'exprime en Nm ou Nmm. Il s'agit en général d'un couple (transmission d'un moment sans force résultante).
La plupart du temps, le couple est transmis par l'intermédiaire d'une liaison encastrement. Un couple peut également être transmis par une liaison appui-plan, une liaison glissière, …
Notes pour les enseignants
[modifier | modifier le wikicode]La notion de centre de gravité concerne toutes les formations, mais on se contente la plupart du temps de donner sa position. Le calcul du centre de gravité d'un ensemble, ou bien la détermination du centre de gravité d'une tôle, concerne essentiellement les chaudronniers.
Diplômes français
[modifier | modifier le wikicode]Unités des diplômes français concernées par ce chapitre :
- bac pro EDPI :
- S4.1.2 : Actions mécaniques ;
- actions de contact : actions dues aux fluides, actions de liaisons entre solides ;
- actions à distance : notion de masse, notion de poids, centre de gravité ;
- S4.1.3 : Actions mécaniques transmissibles par une liaison ;
- S4.1.2 : Actions mécaniques ;
- bac pro TU : S1.3.2 : Modélisation des actions mécaniques
- nature des actions mécaniques s'exerçant sur un solide : actions à distance, actions de contact,
- hypothèses simplificatrices :
- représentation d'une action mécanique : par une force, par un couple ;
- caractérisation d'une force, d'un couple ;
- expression algébrique du moment d'une force, d'un couple ;
- bac pro MEI : S.1.1.2 : Mécanique — Statique : modélisation des actions mécaniques, actions mécaniques sur un solide
- modélisation des actions mécaniques : forces, moments, couples ;
- actions de contact : actions de liaison entre solides, actions dues aux fluides ;
- actions à distance ;
- actions mécaniques dans les liaisons : actions associées aux liaisons mécaniques élémentaires ;
- bac pro ROC-SM : S2.1.1 Statique :
- Notion de force : action mécanique exercée par un corps sur un autre ;
- La force : modèle physique d'une action mécanique engendrée par un contact supposé ponctuel :
- ses effets statique,
- selon son intensité : déformations élastiques, mesures, unités ;
- selon sa direction et sa position, bras de levier ;
- sa modélisation vectorielle : le vecteur lié, le point vecteur ;
- Action mécanique à distance : poids d'un corps, centre de gravité ;
- bac pro TCI : S1.4.1 Statique — Modélisation des actions mécaniques
- actions de contact, moments ;
- actions de liaisons entre solides : actions dues aux fluides, actions à distance, actions mécaniques dans les liaisons.
Pour les baccalauréats non-professionnels :
- bac STI GM productique mécanique : A1-2.1 Actions mécaniques sur un solide
- notion de force : caractérisation d'une force, moment en un point, variation du moment d'un point à un autre ;
- actions mécaniques à distante : effet de gravitation ;
- actions mécaniques de contact : actions d'un fluide sur la surface d'un solide, actions d'un solide sur un autre solide :
- actions ponctuelles : hypothèses simplificatrices ;
- actions mécaniques dans les liaisons entre solides :
- liaisons parfaites ;
- action mécanique transmissible par une liaison élémentaire parfaite.
Voir aussi
[modifier | modifier le wikicode]Notes
[modifier | modifier le wikicode]- ↑ pousser une table dans deux directions différentes
- ↑ L'enseignant s'attachera à donner un exemple « local », une autoroute passant à proximité, ce qui sera plus parlant pour l'élève.
- ↑ Cette notation n’est pas normalisée et donc pas universelle, mais elle a l'avantage d’être claire. Certains auteurs proposent, dans ce cas-là, de mettre simplement un trait sans flèche « — », voir Nicolas Mattéra, René Marquez, Claude Montfollet, Mécanique générale, Paris, Dunod, coll. « Agati », 1992 (ISBN 2-10-001027-1), p. 56